
延时函数介绍(了解)
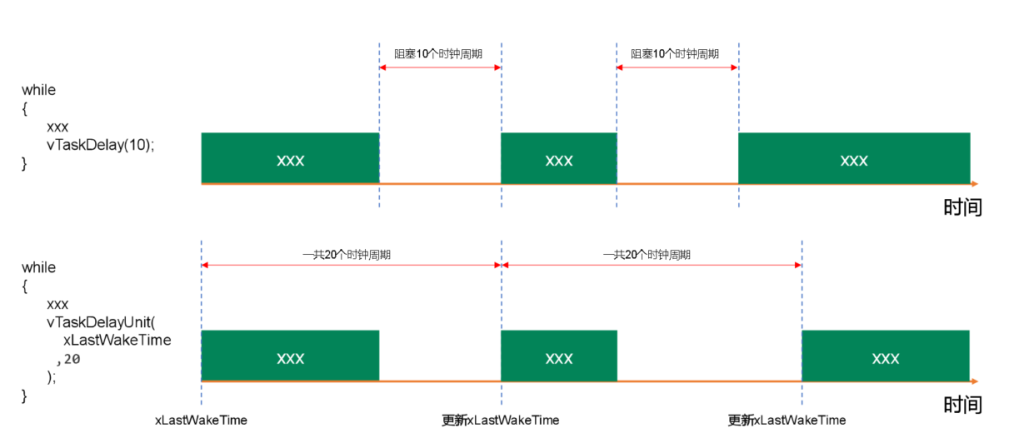
- vTaskDelay():相对延时。从执行vTaskDelay()函数开始,直到指定延时的时间结束。
- xTaskDelayUntil():绝对延时。将整个任务的运行周期视为一个整体,适用于需要以固定频率定期执行的任务。
假设有一个定时器,每隔1秒触发一次,希望在每次触发时执行某个任务。如果使用 vTaskDelay 来实现,那么你只能实现任务每秒执行一次,而不能确保任务在每秒的开始时刻执行。但如果你使用 xTaskDelayUntil,你可以指定任务在每秒的开始时刻执行,即使任务执行的时间不同。
延时函数演示实验(掌握)实验目标
学习 FreeRTOS延时函数的使用,了解相对延时和绝对延时的区别:
- start_task:用来创建其他的2个任务。
- task1:用于展示相对延时函数vTaskDelay ( )的使用。
- task2:用于展示绝对延时函数vTaskDelayUntil( )的使用。
为了观察两个延时函数的区别,将使用LED1 和 LED2的翻转波形来表示。
freertos_demo.c代码清单
#include "freertos_demo.h"
/* freertos相关的头文件,必须的 */
#include "FreeRTOS.h"
#include "task.h"
/* 需要用到的其他头文件 */
#include "LED.h"
#include "Key.h"
/* 启动任务的配置 */
#define START_TASK_STACK 128
#define START_TASK_PRIORITY 1
TaskHandle_t start_task_handle;
void start_task(void *pvParameters);
/* 任务1的配置 */
#define TASK1_STACK 128
#define TASK1_PRIORITY 2
TaskHandle_t task1_handle;
void task1(void *pvParameters);
/* 任务2的配置 */
#define TASK2_STACK 128
#define TASK2_PRIORITY 3
TaskHandle_t task2_handle;
void task2(void *pvParameters);
/**
* @description: 启动FreeRTOS
* @return {*}
*/
void freertos_start(void)
{
/* 1.创建一个启动任务 */
xTaskCreate((TaskFunction_t)start_task, // 任务函数的地址
(char *)"start_task", // 任务名字符串
(configSTACK_DEPTH_TYPE)START_TASK_STACK, // 任务栈大小,默认最小128,单位4字节
(void *)NULL, // 传递给任务的参数
(UBaseType_t)START_TASK_PRIORITY, // 任务的优先级
(TaskHandle_t *)&start_task_handle); // 任务句柄的地址
/* 2.启动调度器:会自动创建空闲任务 */
vTaskStartScheduler();
}
/**
* @description: 启动任务:用来创建其他Task
* @param {void} *pvParameters
* @return {*}
*/
void start_task(void *pvParameters)
{
/* 进入临界区:保护临界区里的代码不会被打断 */
taskENTER_CRITICAL();
/* 创建3个任务 */
xTaskCreate((TaskFunction_t)task1,
(char *)"task1",
(configSTACK_DEPTH_TYPE)TASK1_STACK,
(void *)NULL,
(UBaseType_t)TASK1_PRIORITY,
(TaskHandle_t *)&task1_handle);
xTaskCreate((TaskFunction_t)task2,
(char *)"task2",
(configSTACK_DEPTH_TYPE)TASK2_STACK,
(void *)NULL,
(UBaseType_t)TASK2_PRIORITY,
(TaskHandle_t *)&task2_handle);
/* 启动任务只需要执行一次即可,用完就删除自己 */
vTaskDelete(NULL);
/* 退出临界区 */
taskEXIT_CRITICAL();
}
/**
* @description: 任务一:实现LED1每500ms闪烁一次
* @param {void} *pvParameters
* @return {*}
*/
void task1(void *pvParameters)
{
while (1)
{
// printf("task1运行...\r\n");
LED_Toggle(LED1_Pin);
HAL_Delay(20);
vTaskDelay(500);
}
}
/**
* @description: 任务二:实现LED2每500ms闪烁一次
* @param {void} *pvParameters
* @return {*}
*/
void task2(void *pvParameters)
{
TickType_t pxPreviousWakeTime = xTaskGetTickCount();
while (1)
{
// printf("task2运行...\r\n");
LED_Toggle(LED2_Pin);
HAL_Delay(20);
vTaskDelayUntil(&pxPreviousWakeTime,500);
}
}
Comments NOTHING